












Международная группа исследователей представила новый чип системы безопасности для беспилотных авто, способной реагировать на опасности на дороге быстрее реальных водителей.
Ученые из Китая, Великобритании, Гонконга, Саудовской Аравии и США создали аппаратный «рефлекс» для ускорения принятия решений автоматизированной системой вождения. Разработка решает давнюю проблему в области робототехники и беспилотного транспорта. Обычно автоматизированным системам необходимо больше времени, чем людям для интерпретации визуальных данных и реагирования на внезапные инциденты.


На скорости около 80 км/ч автоматизированной системе необходимо около 0,5 сек для реагирования на препятствие. За это время транспортное средство проедет еще около 13 м прежде чем начнет тормозить. Мозг человека в той же ситуации реагирует за 0,15 сек. Даже при использовании современных процессоров покадровый анализ изображений высокого разрешения будет занимать время. Система должна определить, что и куда движется и представляет ли объект опасность. Это вызывает беспокойство относительно безопасной работы роботизированных систем, дронов и беспилотных авто.
В реальных условиях на дороге доли секунды играют ключевое значение. Более медленная реакция увеличивает тормозной путь и риск столкновения. Инженеры постоянно работают над тем, чтобы сократить разрыв между скоростью человеческого восприятия и обработкой информации компьютерами. Исследователи сосредоточились на решении этого вопроса на аппаратном уровне. Они стремились обеспечить более быстрое принятие решений без необходимости полной переработки системы имеющихся камер.
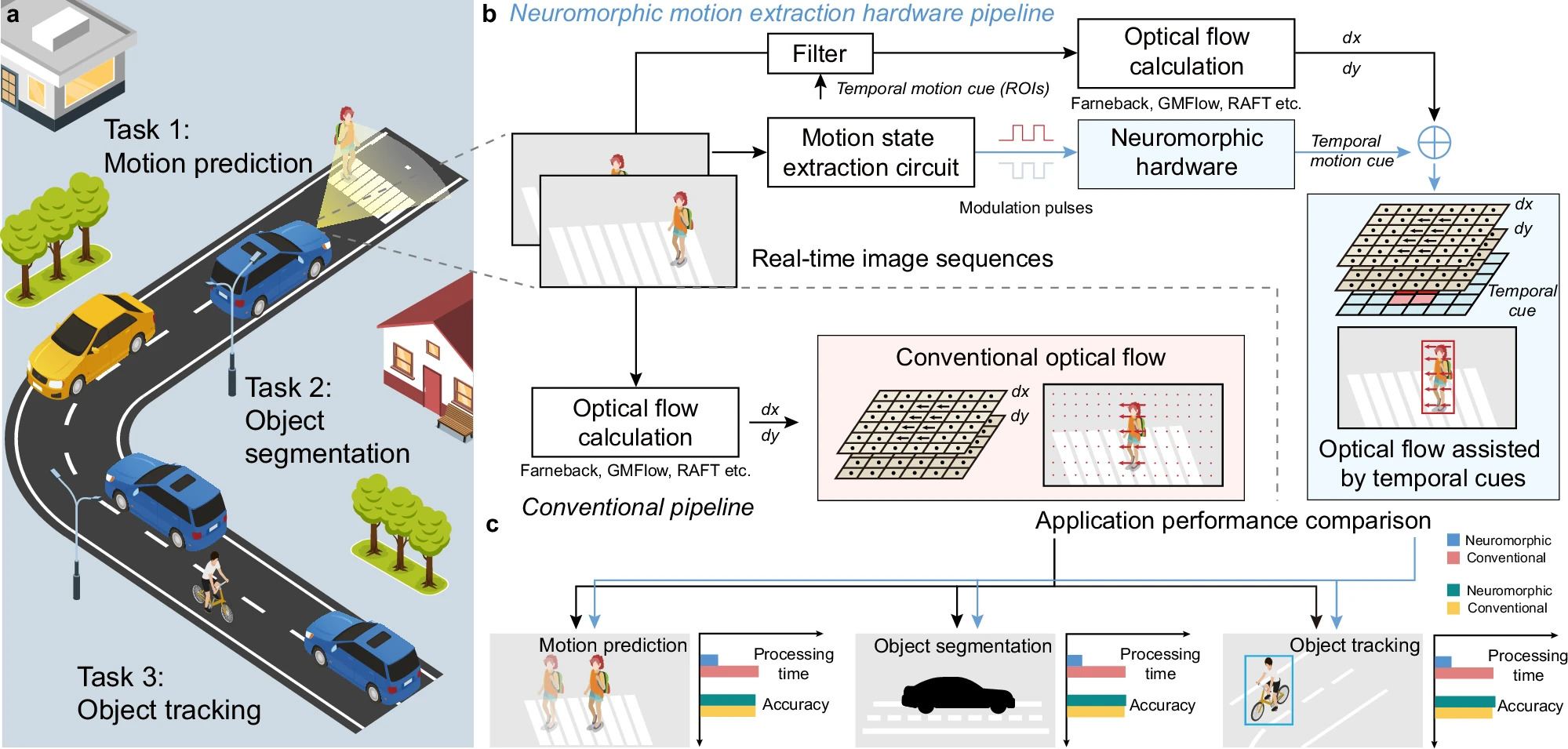
Исследователи смоделировали систему по принципу работы человеческого зрения. Вместо того, чтобы анализировать каждую деталь, человеческий мозг быстро обнаруживает внезапное движение или изменения и реагирует на опережение. Детальная обработка проводится уже позже. Новая система базируется на двухмерном массиве синаптических транзисторов, который описывается как высокочувствительный чип обнаружения движения. Он использует подход «фильтрация-обработка», сначала отфильтровывая неактуальные визуальные данные, а затем определяя ключевые изменения.
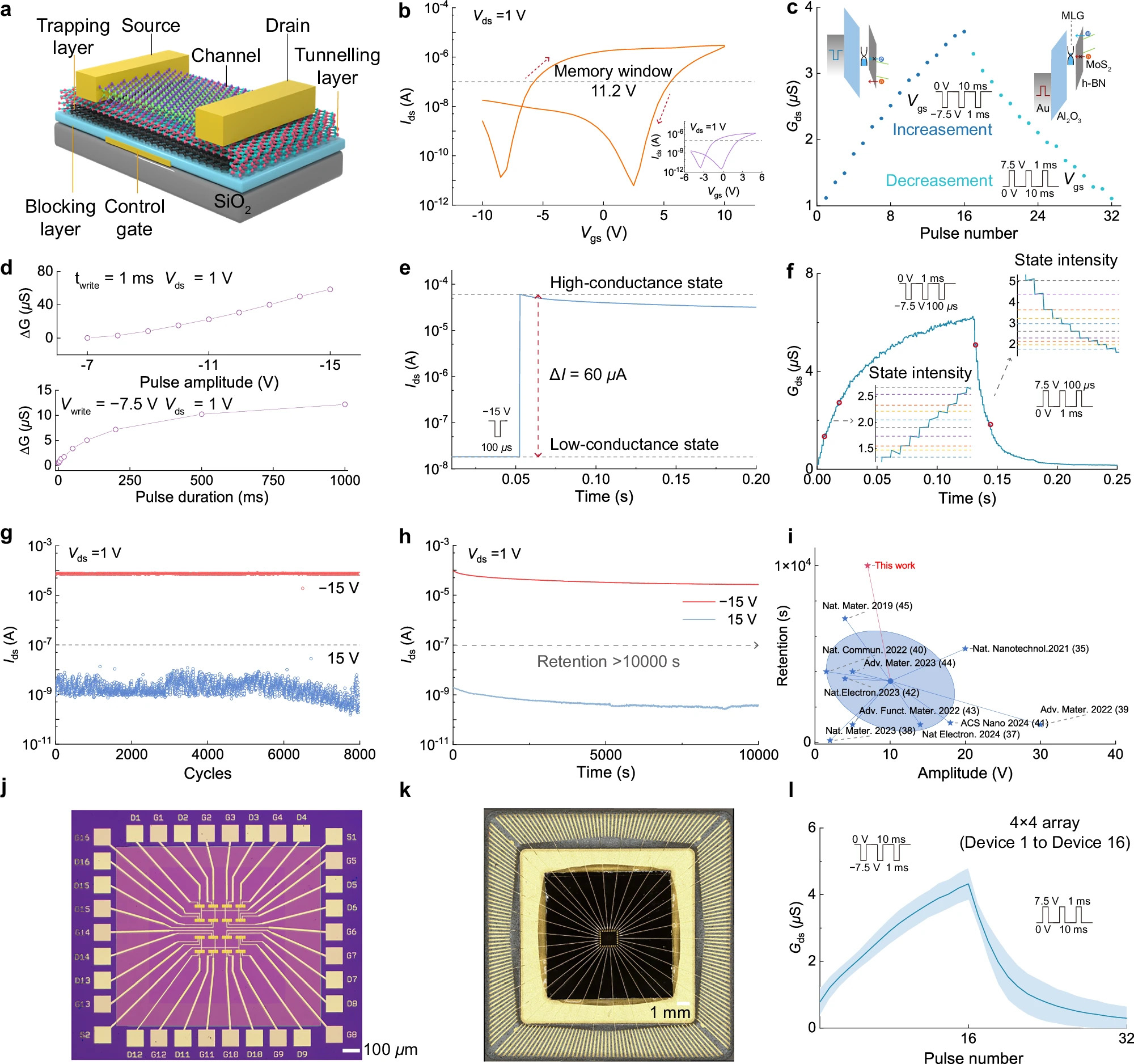
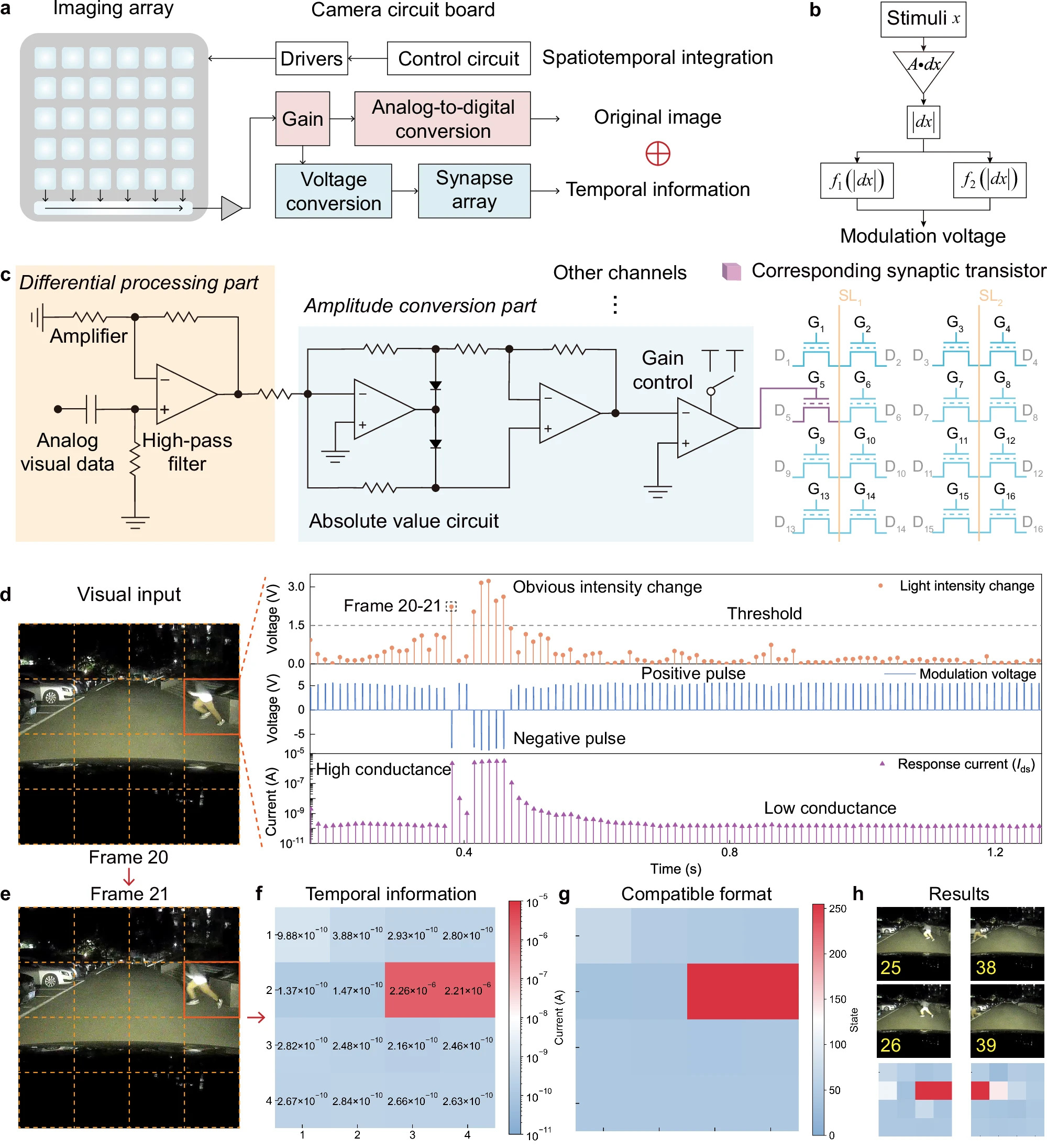
Транзистор способен обнаруживать изменения изображения всего за 100 микросекунд, что значительно быстрее человеческого восприятия. Он сохраняет информацию о движении более 10 тыс. сек и работает более 8 тыс. циклов без потери производительности. После захвата кадра чип игнорирует целостное изображение и регистрирует только движущиеся объекты.
Эти выбранные сигналы передаются стандартным алгоритмам машинного зрения для более глубокого анализа. Результаты исследования показывают, что этот подход более чем в 10 раз быстрее традиционных методов обработки изображений. В лабораторных условиях система обрабатывала данные о движении в 4 раза быстрее современных алгоритмов. В идеальных условиях она превзошла скорость реакции человека.
Исследователи заявляют об улучшении обнаружения опасностей на 213,5% по результатам испытаний на вождение и об увеличении способности роботизированных систем захватывать объекты на 740,9%. В реальных условиях эффективность была несколько ниже, однако все же превышала имеющиеся автоматизированные системы вождения. На скорости 80 км/ч улучшение времени реакции примерно на 0,2 сек сокращает тормозной путь примерно на 4 м.
«Наш подход демонстрирует ускорение на 400%, что превышает показатели человека, при этом сохраняя или повышая точность за счет временных априорных данных. Мы не полностью заменяем существующую систему камер; вместо этого, используя аппаратные модули, мы позволяем текущим алгоритмам компьютерного зрения работать вчетверо быстрее, чем раньше, что имеет большую практическую ценность для инженерных приложений. В ДТП эти 4 метра часто определяют, произойдет ли столкновение, или это будет лишь опасное стечение обстоятельств», — объясняет соавтор исследования из Пекинского университета авиации и космонавтики Гао Шуо.
В случае с небольшими дронами время реакции сократилось по крайней мере на треть, что улучшило выносливость и летные характеристики. Исследователи рассчитывают, что проект будет сотрудничать с ведущими автомобильными и беспилотными компаниями
Мы писали, что автопилот Garmin впервые самостоятельно посадил самолет. В то же время, несмотря на заявления Илона Маска, Tesla контролирует «бесконтрольные» Robotaxi.
СпецпроектыBitget і BlockSec представляють стандарт безпеки UEX. Як він допоможе біржам справлятися з ризиками?Як технології покращують онлайн-освіту для дітей: досвід сучасних шкіл та поради батькам
Роботакси Waymo завезло пассажира на трамвайные рельсы и заставило бежать
Результаты исследования опубликованы в журнале Nature
Источник: Interesting Engineering





{kind=link}